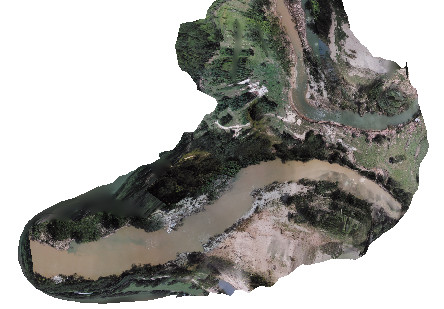
Reliasolve started working with Dr. Robin Murphy, the director of the Center for Robot-Assisted Search and Rescue at Texas A&M University, in June 2015 to develop a Visual Common Ground environment to display 3D terrain models reconstructed from drone fly-overs to provide a space for disaster responders to discuss and plan.
The initial goals of this project are: (1) to provide understanding of where more data needs to be taken to improve the model; and (2) to display differences between two times, indicating where new terrain has been exposed as flooding recedes.
This project was implemented in OSVR using either an Oculus DK2 or the OSVR HDK and a hand-held game controller to enable flying over the entire terrain and viewing it from any angle.